Basic settings
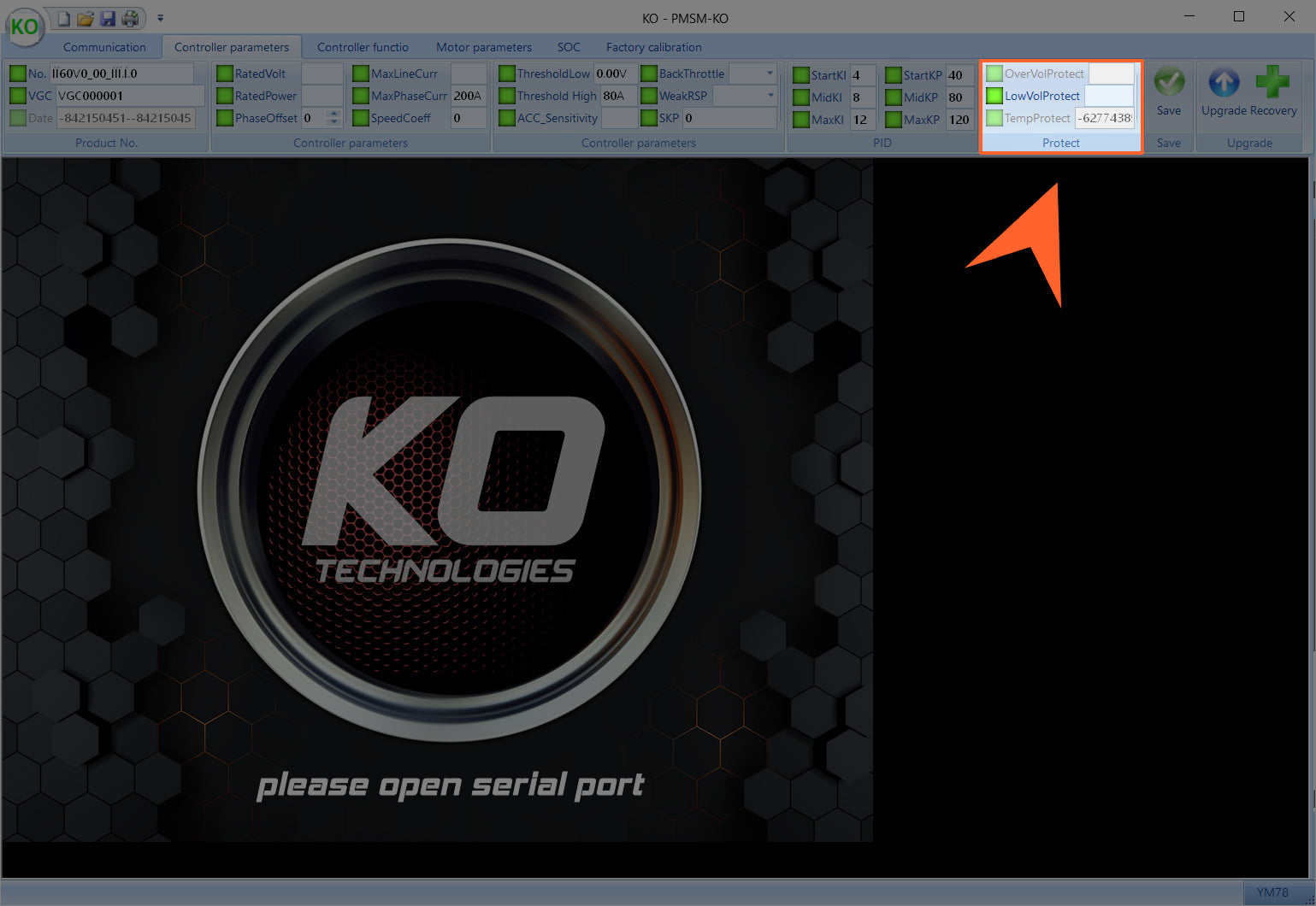
LowVolProtect (Low Voltage Protection)
Measured in volts. Should be set based on the manufacturer’s specifications for your battery. If you are using multiple different voltages, be sure to upload the correct firmware file to your controller. There is a different software for 60V and 72V batteries and the low voltage for each should be set accordingly. This setting should be verified anytime you do a firmware update.
MaxLineCurr (Maximum DC Current)
Maximum DC current into the controller from the battery. Measured in amps. Stock Sur Ron batteries should be set to 95A. Third-party batteries should be set to manufacturer’s specifications. Symptoms of an incorrect setting include a sudden slow down or a loss of power as the battery BMS either throttles or shuts power off to the bike completely. If that happens, turn this setting down and give the battery time to cool down before trying again. Maximum setting is 370A.
MaxPhaseCurr
Maximum phase current available to the motor. Measured in amps. Maximum setting is 800A.
Rated Voltage
Displays the intended battery voltage. This will depend on the update you have chosen (60V, 72V or 84V).
ThresholdLow (Minimum Throttle Input)
Adjusts the point at which the throttle will start to engage. Measured in volts. Use this to calibrate where the throttle comes on for your bike. We suggest making small changes and testing the effects with the back wheel lifted off the ground. You can adjust this value to add deadbanding to your throttle. Adding too much deadband may make the throttle unpredictable when accelerating. Adjust with care.
ThresholdHigh (Maximum Throttle Input)
Adjusts the point at which the throttle will be 100% open. Measured in volts. This sets the maximum voltage that can be supplied by your throttle. We suggest making small changes and testing the effects with the back wheel lifted off the ground. You can adjust this value to add deadbanding to your throttle. Adding too much deadband may make the throttle unpredictable when accelerating. Adjust with care.
Advanced settings and automatically calibrated values
CAUTION: Doing something wrong here could cause serious damage. Advanced users only.
ACC_Sensitivity (Throttle Sensitivity)
This setting adjusts throttle sensitivity in a range from 5-224. A lower number will cause a less aggressive feel on acceleration. This value is set to 224 by default and should be left there.
BackThrottle (Negative Throttle Adjustment)
This setting slows throttle deceleration in a range from 0-7. This value is set to 0 by default. Raising the number will increase the time it takes for throttle deceleration to come into effect after dropping the throttle. Use this parameter to delay engine braking and allow the bike to freewheel for a short time.
OverVolProtect (Over Voltage Protection)
Automatically calibrated via firmware based on battery voltage. Cannot be changed.
Phase Offset
Automatically calibrated.
Rated Power
Automatically calibrated.
Rated Volt
Automatically calibrated.
Speed Coeff
Automatically calibrated.
SKP (PID Controller Response Time)
This setting changes PIDs to alter response time on the controller. Values available are 0-128 where 0 is fastest response time and 128 is slowest. The standard Sur Ron setting is 5 and we have never needed to change it.
Start/Mid/Max KI (Motor Vibration Control)
This setting controls motor vibration. In our experience, the stock setting is great for both KO and OEM motors and does not need to be changed.
Temperature Protection
Thermal protection for the controller. Measured in degrees Celsius. When the controller reaches 80°C (176°F) it begins to throttle performance until the unit cools. At 90°C (194°F) the controller will cut power until the temperature drops to 80°C again. These are hard limits and are not adjustable.
WeakRSP (Magnetic Field Weakening)
Reducing this number effectively reduces the maximum RPM of the motor. The lower the number, the higher level of magnetic weakening is used, which means a setting of 0 is maximum field weakening. 0 is the default setting and we suggest leaving it there for a basic tune. For a more refined tune, or depending on your power goals, you may need to make a slight adjustment here to ensure smooth power output beyond about 4500 RPM. In that case try 2 or 3.